Эта статья не совсем вписывается в тематику блога, но все же я должен поделиться результатами работы, потому что я и не только я на это потратил несколько месяцев работы по вечерам. Здесь будет и CUDA, и алгоритмы оптимизации, и физика, и математика.
Не буду говорить, как мне досталась эта задача, поэтому сразу к делу.
Есть в химическом машиностроении такие машины барабаны-сушилки-грануляторы. Выглядят они примерно так
Если сделать срез, то перед нами предстанет такая картина
 Если описывать простыми словами, то в барабане мокрый песочек и горячий воздух, барабан вращается, лопатки внутри загребают песочек и несут его вверх, откуда песочек ссыпается вниз. Результатом этого процесса является сухой песочек.
Если описывать простыми словами, то в барабане мокрый песочек и горячий воздух, барабан вращается, лопатки внутри загребают песочек и несут его вверх, откуда песочек ссыпается вниз. Результатом этого процесса является сухой песочек.
Устройства эти применяются уже давно и чтобы чем-то удивить производителей, нужно сильно постараться. Но мы попробуем.
Основной задачей таких машин является сушка и чем быстрее она будет проходить, тем лучше. Чтобы улучшить производительность нужно что-то поменять в этой машине. Но барабан - он и в Африке барабан, менять можно только лопатки.
Решено было сделать простую симуляцию системы частиц во вращающемся барабане. Частиц очень много, поэтому симуляцию хорошо было бы производить на CUDA, тем более ноут с нужной видеокарточкой давно ждал своего часа.
Качаем драйвера и SDK, ставим. В примерах видим подходящий шаблон, который называется particles. Вот на youtube нашел видео с записью процесса симуляции
Здесь, как мы видим, все происходит в неподвижном кубе. Нам нужно переделать куб на цилиндр с конфигурируемыми лопатками, а потом заставить это вращаться.
В проекте открываем файл particles_kernel.cu и ищем там описание структуры integrate_functor. Здесь содержится описание процесса интегрирования. А процесс интегрирования включает в себя не только определение новой координаты через значение силы, но и проверку граничных условий.
При замене куба на цилиндр эта стенка как раз останется, поэтому здесь мы менять ничего не будем, не будем менять и обработку соударения с противоположной стенкой. А вот другие обработки закомментируем.
Столкновение с цилиндром будет происходить, когда проекция радиус-вектора частицы на плоскость XY будет по модулю больше единицы (цилиндр единичного радиуса, и его ось лежит на оси Z).
Для такой проекции мы в начале функции объявляем переменную post
Не буду говорить, как мне досталась эта задача, поэтому сразу к делу.
Есть в химическом машиностроении такие машины барабаны-сушилки-грануляторы. Выглядят они примерно так
 |
| Источник: http://www.prom59.ru/sushilka.htm |

Устройства эти применяются уже давно и чтобы чем-то удивить производителей, нужно сильно постараться. Но мы попробуем.
Основной задачей таких машин является сушка и чем быстрее она будет проходить, тем лучше. Чтобы улучшить производительность нужно что-то поменять в этой машине. Но барабан - он и в Африке барабан, менять можно только лопатки.
Решено было сделать простую симуляцию системы частиц во вращающемся барабане. Частиц очень много, поэтому симуляцию хорошо было бы производить на CUDA, тем более ноут с нужной видеокарточкой давно ждал своего часа.
Качаем драйвера и SDK, ставим. В примерах видим подходящий шаблон, который называется particles. Вот на youtube нашел видео с записью процесса симуляции
Здесь, как мы видим, все происходит в неподвижном кубе. Нам нужно переделать куб на цилиндр с конфигурируемыми лопатками, а потом заставить это вращаться.
В проекте открываем файл particles_kernel.cu и ищем там описание структуры integrate_functor. Здесь содержится описание процесса интегрирования. А процесс интегрирования включает в себя не только определение новой координаты через значение силы, но и проверку граничных условий.
if (pos.z > 0.25f - params.particleRadius) { pos.z = 0.25f - params.particleRadius; vel.z *= -0.6f; }
Здесь мы видим обработку события столкновения частицы с одной из стенок куба. Это условие очевидно. Если частица в результате изменения координаты оказалась за границей стенки, то мы ее перемещаем так, чтобы она находилась ровно на стенке, а одну из составляющих ее скорости меняем на противоположную и учитываем потерю энергии при соударении.При замене куба на цилиндр эта стенка как раз останется, поэтому здесь мы менять ничего не будем, не будем менять и обработку соударения с противоположной стенкой. А вот другие обработки закомментируем.
Столкновение с цилиндром будет происходить, когда проекция радиус-вектора частицы на плоскость XY будет по модулю больше единицы (цилиндр единичного радиуса, и его ось лежит на оси Z).
Для такой проекции мы в начале функции объявляем переменную post
float3 post = make_float3(posData.x, posData.y, 0.0f);А потом проверяем
if (length(post) > 1.0f) {
Что же нужно делать в случае соударения частицы с внутренней поверхностью цилиндра? Будем раскладывать скорость по двум осям: одна ось образована радиусом цилиндра, а другая перпендикулярна ей и сонаправлена с вектором тангенциальной скорости. По нормальной оси будет происходить то же, что и при соударении со стенкой (составляющая скорости вдоль радиус-вектора меняет напрвление, а модуль уменьшается из-за частичного перехода кинетической энергии в тепловую), а по тангенциальной будет действовать сила трения, зависящая от силы реакции опоры.
 Здесь коэффициент трения растет сверху вниз. Не очень заметно, но частицы ложатся шире с большим коэффициентом трения, как оно и должно быть.
Здесь коэффициент трения растет сверху вниз. Не очень заметно, но частицы ложатся шире с большим коэффициентом трения, как оно и должно быть.
Теперь столкнем частицы с лопатками. Не будем здесь описывать как генерируются лопатки. Скажем лишь, что в памяти хранятся избыточные параметры лопаток. Мы храним и координаты вершин, и длины сегментов с углами между ними.
 На картинке изображены те параметры, которые хранятся в файле инициализации(о нем позже).
На картинке изображены те параметры, которые хранятся в файле инициализации(о нем позже).
Избыточность как обычно применяется для ускорения вычислений. Для определения факта столкновения как раз будут применяться координаты вершин сегментов лопаток.
 Если вы еще не поняли, то лопатка в нашей модели представляется как набор четырехугольников (если на них смотреть сбоку). На картинке изображен сегмент, прилегающий к стенке барабана, и часть следующего сегмента. Толщина лопатки такова, что за один шаг симуляции никакая из частиц не пролетит и половины толщины лопатки (ну это если ко всему подходить систематично и серьезно, на самом деле выбираем так, чтобы выглядело красиво и этого окажется более чем достаточно).
Если вы еще не поняли, то лопатка в нашей модели представляется как набор четырехугольников (если на них смотреть сбоку). На картинке изображен сегмент, прилегающий к стенке барабана, и часть следующего сегмента. Толщина лопатки такова, что за один шаг симуляции никакая из частиц не пролетит и половины толщины лопатки (ну это если ко всему подходить систематично и серьезно, на самом деле выбираем так, чтобы выглядело красиво и этого окажется более чем достаточно).
Узнать, столкнулась ли частица с лопаткой, можно, проверив, находится ли она внутри прямоугольника сегмента. Если да, то обрабатываем столкновение.
В результате столкновения частицу нужно будет перенести к одной из стенок. Чтобы узнать к какой стенке переносить частицу, смотрится ее предыдущее положение. Для этого из радиус-вектора текущего положения вычитается вектор скорости, умноженный на шаг времени. А потом проверяется, по разные стороны от какой плоскости лопатки находятся эти две точки. И к той плоскости и переносим частицу. Частицы переносятся по перпендикуляру к плоскости. Есть одна тонкость для сегмента, изображенного на рисунке выше. В некоторых случаях частицы начнут переноситься за границы цилиндра. И мы будем наблюдать "залипания" частиц. Поэтому здесь необходим дополнительный перенос вдоль направляющей сегмента до тех пор, пока частица не окажется на поверхности цилиндра.
Вот код, выполняемый при столкновении с первым сегментом.
Накидаю немного картинок.
Вот одна лопатка из одного сегмента.
 Вот много односегментных лопаток.
Вот много односегментных лопаток.
 Вот четырехсегментные.
Вот четырехсегментные.
 А вот и пятисегментные. Этого количества вполне достаточно, чтобы моделировать скругления на лопатках.
А вот и пятисегментные. Этого количества вполне достаточно, чтобы моделировать скругления на лопатках.
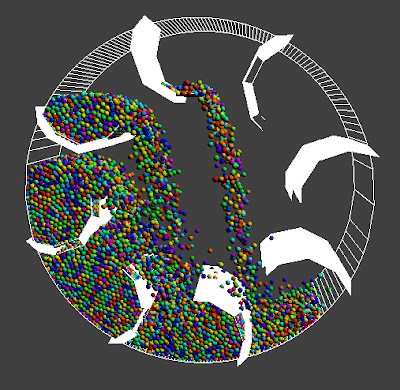
 Вращение барабана медленное, поэтому мы не будем учитывать скорости, которые передаются частицам в результате вращения. К этому моменту физика, можно сказать, прописана. Так что можно и сравнить с реальным поведением частиц. Благо, такая возможность была.
Вращение барабана медленное, поэтому мы не будем учитывать скорости, которые передаются частицам в результате вращения. К этому моменту физика, можно сказать, прописана. Так что можно и сравнить с реальным поведением частиц. Благо, такая возможность была.
 Ну что сказать... Похоже.
Ну что сказать... Похоже.
Ну и видео еще вставим.
Код проекта можно будет найти в конце, а пока перейдем к оптимизации процесса.
Оптимизация - это довольно сложная область математики, имеющая в своем арсенале кучу методов. Критерии выбора этих методов известны профессионалам. Поэтому сразу стоит сказать, что наш метод (эволюционная оптимизация) может и не являться оптимальным. Выбран он был, потому что было просто интересно посмотреть, что из этого получится.
В Интернете много статей по применению метода.
 Вкратце:
Вкратце:
if (length(post) > 1.0f) {
post = post / length(post); //возвращаем частицу на стенку цилиндра
pos.x = post.x;
pos.y = post.y;
norm_axis = post; //нормальная ось есть радиус-вектор
//тангенциальная ось вычисляется исходя из предположения, что
//срость не будет направлена только вдоль радиус-вектора
//всегда должна быть хоть какая-то составляющая,
//которая и равна vel - dot(vel, norm_axis)*norm_axis
tan_axis = (vel - dot(vel, norm_axis)*norm_axis) /
length(vel - dot(vel, norm_axis)*norm_axis);
float tan_vel = dot(vel, tan_axis);
force = -1.5f*dot(vel, norm_axis)*norm_axis/deltaTime;
force -= friction_coef*length(force)*tan_axis;
tan_axis.x = norm_axis.y;
tan_axis.y = -norm_axis.x;
tan_axis.z = 0.0f;
}
К этому моменту уже нужно провести эксперимент: проверить, "работает" ли сила трения. Для этого меняем коэффициент трения и смотрим, как "устаканятся" частицы.

Теперь столкнем частицы с лопатками. Не будем здесь описывать как генерируются лопатки. Скажем лишь, что в памяти хранятся избыточные параметры лопаток. Мы храним и координаты вершин, и длины сегментов с углами между ними.

Избыточность как обычно применяется для ускорения вычислений. Для определения факта столкновения как раз будут применяться координаты вершин сегментов лопаток.

Узнать, столкнулась ли частица с лопаткой, можно, проверив, находится ли она внутри прямоугольника сегмента. Если да, то обрабатываем столкновение.
В результате столкновения частицу нужно будет перенести к одной из стенок. Чтобы узнать к какой стенке переносить частицу, смотрится ее предыдущее положение. Для этого из радиус-вектора текущего положения вычитается вектор скорости, умноженный на шаг времени. А потом проверяется, по разные стороны от какой плоскости лопатки находятся эти две точки. И к той плоскости и переносим частицу. Частицы переносятся по перпендикуляру к плоскости. Есть одна тонкость для сегмента, изображенного на рисунке выше. В некоторых случаях частицы начнут переноситься за границы цилиндра. И мы будем наблюдать "залипания" частиц. Поэтому здесь необходим дополнительный перенос вдоль направляющей сегмента до тех пор, пока частица не окажется на поверхности цилиндра.
Вот код, выполняемый при столкновении с первым сегментом.
if ( InsideTriangle(post, params.p1[i], params.p2[i], params.p3[i]) ||
InsideTriangle(post, params.p2[i], params.p3[i], params.p4[i]) ) {
prev_pos = pos - vel * deltaTime*4;
if (DiffSides(pos, prev_pos, params.p1[i], params.p3[i])) {
D = -(params.A1[i]*pos.x+params.B1[i]*pos.y+params.C11[i])/
(params.A1[i]*params.A1[i]+params.B1[i]*params.B1[i]);
pos.x += D*params.A1[i];
pos.y += D*params.B1[i];
norm_axis = make_float3(params.A1[i], params.B1[i], 0.0f);
norm_axis = norm_axis/length(norm_axis);
vel -= 1.5f * dot(norm_axis, vel)*norm_axis;
post = pos;
post.z = 0.0f;
if (length(post) > 1.0f) {
tan_axis = make_float3(-params.B1[i], params.A1[i], 0.0f);
D = dot(tan_axis, post)*dot(tan_axis, post) -
length(post)*length(post) + 1.0f;
float ksi1 = (-dot(post, tan_axis) + sqrt(D));
float ksi2 = (-dot(post, tan_axis) - sqrt(D));
if(abs(ksi1) < abs(ksi2)) {
pos += ksi1 * tan_axis;
}
else {
pos += ksi2 * tan_axis;
}
}
}
Статья обещает быть большой, поэтому не буду приводить выкладки, как производить переносы, как определять принадлежность к треугольнику и т. д. Учите аналитическую геометрию, если не знаете, как это делать.Накидаю немного картинок.
Вот одна лопатка из одного сегмента.




Ну и видео еще вставим.
Код проекта можно будет найти в конце, а пока перейдем к оптимизации процесса.
Оптимизация - это довольно сложная область математики, имеющая в своем арсенале кучу методов. Критерии выбора этих методов известны профессионалам. Поэтому сразу стоит сказать, что наш метод (эволюционная оптимизация) может и не являться оптимальным. Выбран он был, потому что было просто интересно посмотреть, что из этого получится.
В Интернете много статей по применению метода.

- Есть популяция лопаток (пусть будет их 20 штук) - левый верхний угол
- Из этой популяции выбираются пары для скрещивания - получается новая популяция скрещенных лопаток.
- На некоторые параметры получившихся лопаток может действовать мутация (с низкой вероятностью).
- Из множества имеющихся лопаток выбираются лучшие - те, которые дают наивысшее значение целевой функции.
- Процесс повторяется.
Целевой функцией мы выбрали среднее количество падающих частиц. Правильней было бы выбрать еще и равномерность их распределения в пространстве, но уже было лень. Если кто захочет и это учесть, то для этого пространство внутри барабана нужно разбить на одинаковые по объему участки и считать в каждом из них количество частиц. А потом найти дисперсию в множестве этих количеств. Целевой функцией будет суммарное количество частиц, умноженное на величину обратную дисперсии. Тогда и получится, что чем больше частиц в воздухе и чем равномернее они распределены, тем эффективнее будет происходить процесс.
Считаем мы частицы с помощью библиотеки thrust. Она уже подключена к проекту. Сам я в нее не вникал, сделал по образу и подобию кода из Интернета.
Вот например типичный график количества частиц в воздухе от времени.
 Как видно, количество частиц в конце концов выравнивается. Вот поподробнее в установившемся состоянии.
Как видно, количество частиц в конце концов выравнивается. Вот поподробнее в установившемся состоянии.
 Разброс не такой и большой. Так что можно смело считать среднее значение.
Разброс не такой и большой. Так что можно смело считать среднее значение.
Сложно сказать, что тут можно в подробностях описывать. Тем более исходники будут выложены. Опишу лишь основные функции. Названия всех функций должны быть говорящими.
мамка выгнала спать надоело наблюдать за процессом.
Качайте вот это Polygon.zip (1022 KB), ставьте интерпретатор Python, запускайте, меняйте количество особей в поколении и наблюдайте за чудесами. В архиве прилагается исполняемый файл, так что с первой частью можно не разбираться, если нет желания. И да, прогал под Windows, если хотите под Linux, то нужно поменять директории (я где-то использовал абсолютные адреса).
Какой же результат? Оказался вполне ожидаемым. Уже лет 30 назад наинженерили без всяких моделирований оптимальные формы лопаток.

 В нашем случае получилось то же. Только вот первый вариант вышел даже слегка лучше. Второй сегмент скруглился, тем самым увеличив количество единовременно поднимаемых частиц. Бессознательный поиск дал результат, который несет в себе довольно "глубокую" мысль!
В нашем случае получилось то же. Только вот первый вариант вышел даже слегка лучше. Второй сегмент скруглился, тем самым увеличив количество единовременно поднимаемых частиц. Бессознательный поиск дал результат, который несет в себе довольно "глубокую" мысль!
Еще одна интересная деталь бессознательного поиска. Длины сегментов и кривизна лопаток оказываются в процессе эволюции такими, что "кучки" частиц, которые собираются на лопатке оказываются по размеру ровно такими, что ссыпаться они начинают едва касаясь следующей лопатки. Замечательно, я считаю!
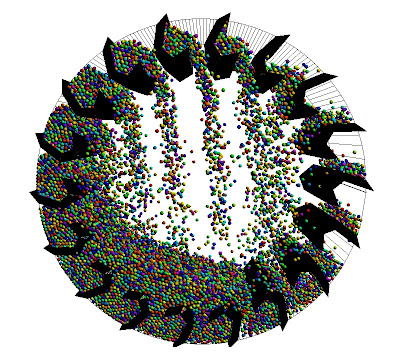
Ну напоследок еще картинок.

 Обещанные исходники симулятора. particles.zip (13.4 MB) Чтобы пробовать разные лопатки можете подредактировать, как вам хочется, файл params.txt.
Обещанные исходники симулятора. particles.zip (13.4 MB) Чтобы пробовать разные лопатки можете подредактировать, как вам хочется, файл params.txt.
В файле конфигурации находятся сначала углы между продолжением сегмента и следующим сегментом, а потом длины сегментов, каждый на новой строке.
И простите за не очень удачный код, который я поленился в итоге переделывать на switch, который выглядел в итоге так
 Не делайте так.
Не делайте так.
struct is_inside
{
__host__ __device__
bool operator() (const float4& x)
{
float2 d_pos3 = make_float2(x.x, x.y);
return (length(d_pos3) < params.min_rad)&&
(d_pos3.y>0.15)&&(d_pos3.y>-d_pos3.x/2+0.15);
}
};
int count_particles(float* pos, uint num_part, float rad)
{
thrust::device_ptr<float4> d_pos4((float4 *)pos);
return thrust::count_if(d_pos4, d_pos4+num_part, is_inside());
}
Каждый кадр количество частиц, находящихся в полете, записывается в файл, который в результате обрабатывается, чтобы найти среднее значение, то есть значение целевой функции.Вот например типичный график количества частиц в воздухе от времени.


Сложно сказать, что тут можно в подробностях описывать. Тем более исходники будут выложены. Опишу лишь основные функции. Названия всех функций должны быть говорящими.
def CreateFirstGeneration(generation, results, generation_size) :
while len(results) < generation_size :
pers = GenerateRandomPerson()
if TestAppend(pers, generation, results) == 0 :
print(str(len(results)))
print("Finally first gen:\n" + str(results))
def SaveGeneration(generation, results, generation_count) :
genf = open("history/gener" + str(generation_count) + ".txt", "w+")
for p in generation :
for g in p[0] :
genf.write(str(g))
genf.write("\n")
for g in p[1] :
genf.write(str(g))
if p != generation[-1]:
genf.write("\n")
elif g != p[1][-1] :
genf.write("\n")
if p != generation[-1] :
genf.write("\n")
genf.close()
resf = open("history/results" + str(generation_count) + ".txt", "w+")
for r in results :
resf.write(str(r))
if r != results[-1] :
resf.write("\n")
resf.close()
def CreateNewGeneration(_prev_gen, _prev_res, _new_gen, _new_res) :
print("Creating new generation")
SortPersons(_prev_gen, _prev_res)
while len(_new_gen) < len(_prev_gen) :
father = randint(0, len(_prev_gen)-1)
mother = randint(0, len(_prev_gen)-1)
print("Creating child" + str(father) + "+" + str(mother))
child = GenerateChild(_prev_gen[mother], _prev_gen[father])
TestAppend(child, _new_gen, _new_res)
SortPersons(_new_gen, _new_res)
_new_gen[:] = _prev_gen[0:int(len(_prev_gen)/2)]+_new_gen[0:int(len(_new_gen)/2)]
_new_res[:] = _prev_res[0:int(len(_prev_res)/2)]+_new_res[0:int(len(_new_res)/2)]
print("Finaly:\n" + str(new_res))
def GenerateChild(pers1, pers2) :
child = []
child.append([])
child.append([])
for i, gene in enumerate(pers1[0]) :
alpha = uniform(-0.25, 1.25)
child[0].append(gene + alpha*(pers2[0][i]-gene))
for i, gene in enumerate(pers1[1]) :
alpha = uniform(-0.25, 1.25)
child[1].append(gene + alpha*(pers2[1][i]-gene))
return child
def TestAppend(person, generation, results) :
if CanItLive(person) :
res = RunSimulation(person)
if res > 20.0 :
generation.append(person)
results.append(res)
print(str(results))
return 0
else :
print("Person can't live : it works bad")
else :
print("Person can't live : it's cripple")
return 1
def RunSimulation(person) :
WritePersonToFile(person)
LaunchApp()
return GetParticlesNumber()
def GetParticlesNumber() :
num = [int(line.strip()) for line in open("result.txt")]
result = sum(num[int(-len(num)/5*2):-1])/(int(len(num)/5*2))
return result
Ну и основная программа выглядит так.cur_generation = []
prev_generation = []
cur_results = []
prev_results = []
generation_counter = 5
#print("Creating first generation")
#CreateFirstGeneration(prev_generation, prev_results, 40)
ResumeProcessing(prev_generation, prev_results, generation_counter)
generation_counter += 1
while generation_counter < 10 :
SaveGeneration(prev_generation, prev_results, generation_counter)
CreateNewGeneration(prev_generation, prev_results, cur_generation, cur_results)
prev_generation = cur_generation
cur_generation = []
prev_results = cur_results
cur_results = []
generation_counter += 1
SaveGeneration(prev_generation, prev_results, generation_counter)
Так как все для домашнего использования, то я не стесняюсь комментировать/раскомментировать некоторые строки в зависимости от ситуации. Так можно возобновить поиск с предыдущего поколения, если машина перегрелась или Качайте вот это Polygon.zip (1022 KB), ставьте интерпретатор Python, запускайте, меняйте количество особей в поколении и наблюдайте за чудесами. В архиве прилагается исполняемый файл, так что с первой частью можно не разбираться, если нет желания. И да, прогал под Windows, если хотите под Linux, то нужно поменять директории (я где-то использовал абсолютные адреса).
Какой же результат? Оказался вполне ожидаемым. Уже лет 30 назад наинженерили без всяких моделирований оптимальные формы лопаток.

Еще одна интересная деталь бессознательного поиска. Длины сегментов и кривизна лопаток оказываются в процессе эволюции такими, что "кучки" частиц, которые собираются на лопатке оказываются по размеру ровно такими, что ссыпаться они начинают едва касаясь следующей лопатки. Замечательно, я считаю!
Ну напоследок еще картинок.

В файле конфигурации находятся сначала углы между продолжением сегмента и следующим сегментом, а потом длины сегментов, каждый на новой строке.
И простите за не очень удачный код, который я поленился в итоге переделывать на switch, который выглядел в итоге так

Комментариев нет:
Отправить комментарий